Topic
Модель работы в режиме Topic подразумевает использование одного типа сообщения для Издателя (Publisher) и Подписчика (Subscriber).
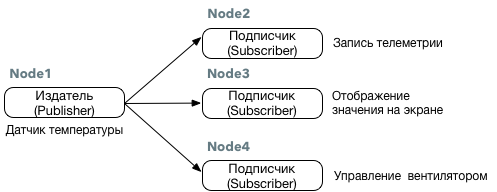
Модель Topic являются однонаправленной и подразумевает непрерывную отправку или получение сообщений. Такой способ коммуникации подходит для датчиков, которым требуются периодическая передача данных. Несколько подписчиков могут получать сообщения от одного издателя и наоборот (возможна работа несколько издателей).
На изображении ниже показана модель работы датчика температуры, когда его данные получают различные ноды.
Консольная утилита rostopic
rostopic - это специальная консольная утилита, предназначенная для отображения отладочной информации о топиках в ROS. С ее помощью удобно искать нужные топики и выводить сообщения в консоль для отладки.
Список основных используемых команд:
rostopic bw Показать занимаемый сетевой канал
rostopic echo Вывести сообщения на экран
rostopic find Поиск топика по типу
rostopic hz Показать частоту обновления топика
rostopic info Показать информацию о топике
rostopic list Показать список существующий топиков
rostopic pub Опубликовать данные в топик
rostopic type Показать тип сообщения для топика
Примеры использования
Вывести список существующих топиков:
rostopic list
Вывести сообщения из топика topic_name:
rostopic echo /topic_name
rostopic pub
Отправить текстовое сообщение в топик:
rostopic pub my_topic std_msgs/String "hello there"
Отправить сообщение типа geometry_msgs/Twistв топик /cmd_vel с частотой 10hz:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.1, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'
Удобно при вызове функций использовать Tab для поиска и подстановки необходимых данных в командную строку.
Например
rostopic pub /c+Tab -> rostopic pub /cmd_vel (подставится адрес существующего топика)
rostopic pub /cmd_vel +Tab -> rostopic pub /cmd_vel geometry_msgs/Twist (подставится тип сообщения выбранного топика)
Более подробная информация доступна на Wiki странице http://wiki.ros.org/rostopic