Работа с rviz и лидаром
Подключение к роботу
Датчики расположены на нашем роботе, а мы хотим визуализировать данные на нашем компьютере.
Для этого необходимо установить две переменные окружения в консоли компьютера:
export ROS_HOSTNAME=ip_компьютера
export ROS_MASTER_URI=http://ip_робота:11311
Для того, чтобы узнать IP-адрес устройства, можно воспользоваться командой ifconfig
rviz
В составе ROS, есть специальная графическая программа rviz, которая служит для визуализации информации из различных систем ROS. В том числе, она может показать данные, которые передает лидар.
Запустим программу rviz из консоли:
rviz
Мы увидим приблизительно такую картинку:
Если нажать на кнопку Add, мы можем увидеть все типы данных, которые программа может визуализировать. С данными которые можно "увидеть" работать намного приятней.
Лидар (lidar)
Основной прибор, который позволяет нашему роботу видеть мир, это лазерный дальномер (лидар) который постоянно сканирует пространство вокруг себя.
За один оборот лидар получает 360 точек с данными расстояния от центра лидара до препятствия, которое встретилось на пути лазерного луча. Каждая из 360 точек соответствует одному градусу оборота лидара.
Данные, которые передает лидар, уже в ROS и их можно получить в топике scan.
Мы можем вывести эти данные в консоль:
rostopic echo /scan
Мы увидим довольно большой поток данных, который сложно "понять" человеку. Но на самом деле это просто данные о расстоянии.
Давайте посмотрим на эти данные в "человеческом" виде в программе rviz.
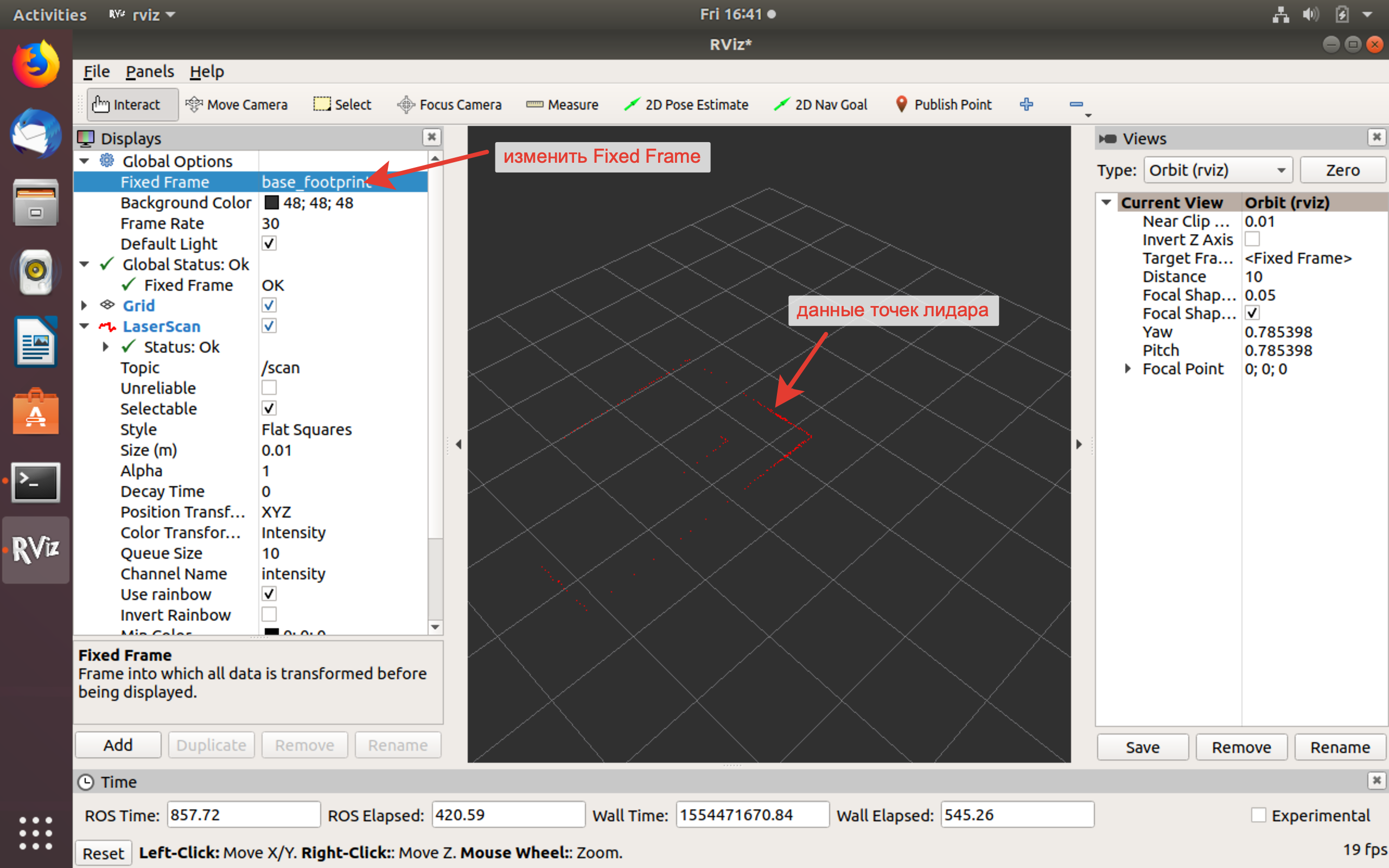
Для того чтобы добавить данные лидара, нам необходимо:
- Изменить
Fixed Frameна вкладкеGlobal Optionуказав точку отсчета - базу роботаbase_footprint - Нажать
Add, выбрать вкладкуBy topic, выбрать источник данных/scan/LaserScan
После выполнения этих настроек, мы увидим отображение облака точек, которые будут визуализировать данные с лидара.
Для удобства восприятия данных с лидара, вы можете изменить размер отображаемых точек, увеличив значение поля Size, например, до 0.03.
Настройка rviz
Отображение модели робота
Для удобства дальнейшего использования программы мы можем добавить отображение модели нашего робота, прямо в окне rviz. Для этого необходимо сделать Add->By display type->RobotModel
Отображение данных о фреймах робота
Фрейм, это отображение некоторой части робота, а также ее связи с другими фреймами - частями робота. Например, если мы сдвигаем базовый фрейм робота base_frame, то автоматически двигаются все связанные с ним фреймы. TF - библиотека, которая отображает фреймы, а так же их пространственную и взаимную ориентацию.
Add->By display type->TF
Сохранение настроек rviz
После завершения первоначальных настроек, удобно их сохранить, для того чтобы при повторном запуске rviz не повторять действия по его настройке заново.
Сохранять и загружать файлы конфигурации можно в разделе File.