move_base и AMCL
Также для практики, нам важно научиться работать с навигацией в режиме, когда у нас уже есть готовая карта, и роботу не нужно ее строить а необходимо только локализовать себя на ней и перемещаться.
Такой режим работы более подходит для задачи патрулирования роботом по уже известному помещению. В этом случаем мы точно можем понимать что заданные координаты перемещения робота никуда не "уплывут" и будут точно соответствовать точкам карты.
Подготовка
Первым шагом, нам необходимо создать и загрузить карту в систему навигации робота.
Подробно мы это описывали ранее в главе Запуск AMCL. Если вы обновили файлы, то необходимо не забыть пересобрать пакет turtlebro_navigation
Запуск навигации
Для запуска полного стека навигации по карте, выполним команду
roslaunch turtlebro_navigation turtlebro_map_navigation.launch open_rviz:=0
Далее запустим rviz и конфигурационный файл turtlebro_navigation.rviz
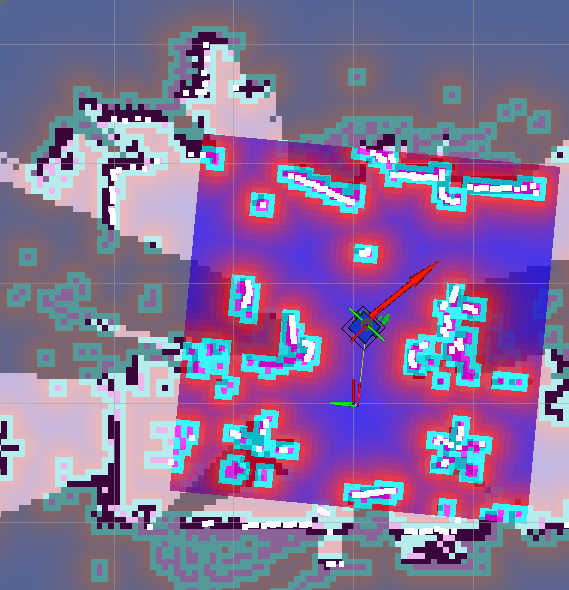
Совместим данные лидара с данными карты.
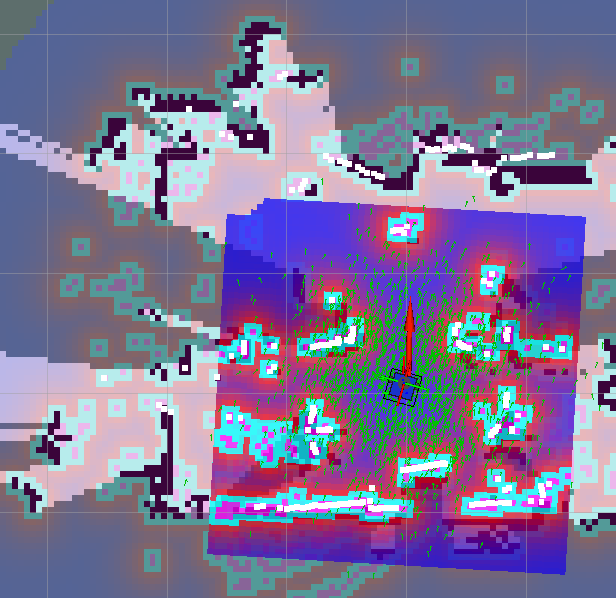
Зеленые стрелочки покажут работу системы локализации.
Если через инструмент 2D Nav Goal задать точку перемещения робота, то робот начнет движение по карте.
С каждой новой "поездкой" точность локализации и соответствие карты данным лидара будут увеличиваться.