Сохранение карты
После того как мы смогли построили карту помещения, нам необходимо сохранить результат нашей работы.
Тогда при повторном включении, нам не нужно заново строить карту, и мы сможем пользоваться уже построенной нами ранее картой.
map_server
http://wiki.ros.org/map_server
map_server - это нода ROS, которая позволяет загружать и сохранять карты в файлы.
Сохранение созданной карты можно сделать при помощи команды (команду необходимо выполнить на роботе):
rosrun map_server map_saver -f map
После выполнения данной команды, будет создано два файла map.yaml и map.pgm
В файле map.yaml находятся параметры карты
image: map.pgm
resolution: 0.050000
origin: [-5.000000, -5.000000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
Основные параметры, это image, который указывает на имя графического файла с картой, resolution - определяет разрешение карты, и origin определяет размеры карты.
Параметры occupied_thresh и free_thresh определяют пороги значений для "занятых" пикселей и свободных.
Файл map.pgm это графический файл формата .pgm, его можно открыть программой просмотра изображений Ubuntu. Но так как map.yaml и map.pgm были сохранены на роботе, то для открытия файла map.pgm его сначала нужно перенести на компьютер воспользовавшись командой scp в консоли на компьютере:
scp pi@ip_робота:/home/pi/map.pgm /home/имя_пользователя/
Пример:
scp pi@192.168.1.74:/home/pi/map.pgm /home/ROS-PC/
После переноса map.pgm на компьютер достаточно просто кликнуть на этот файл из вкладки Files:
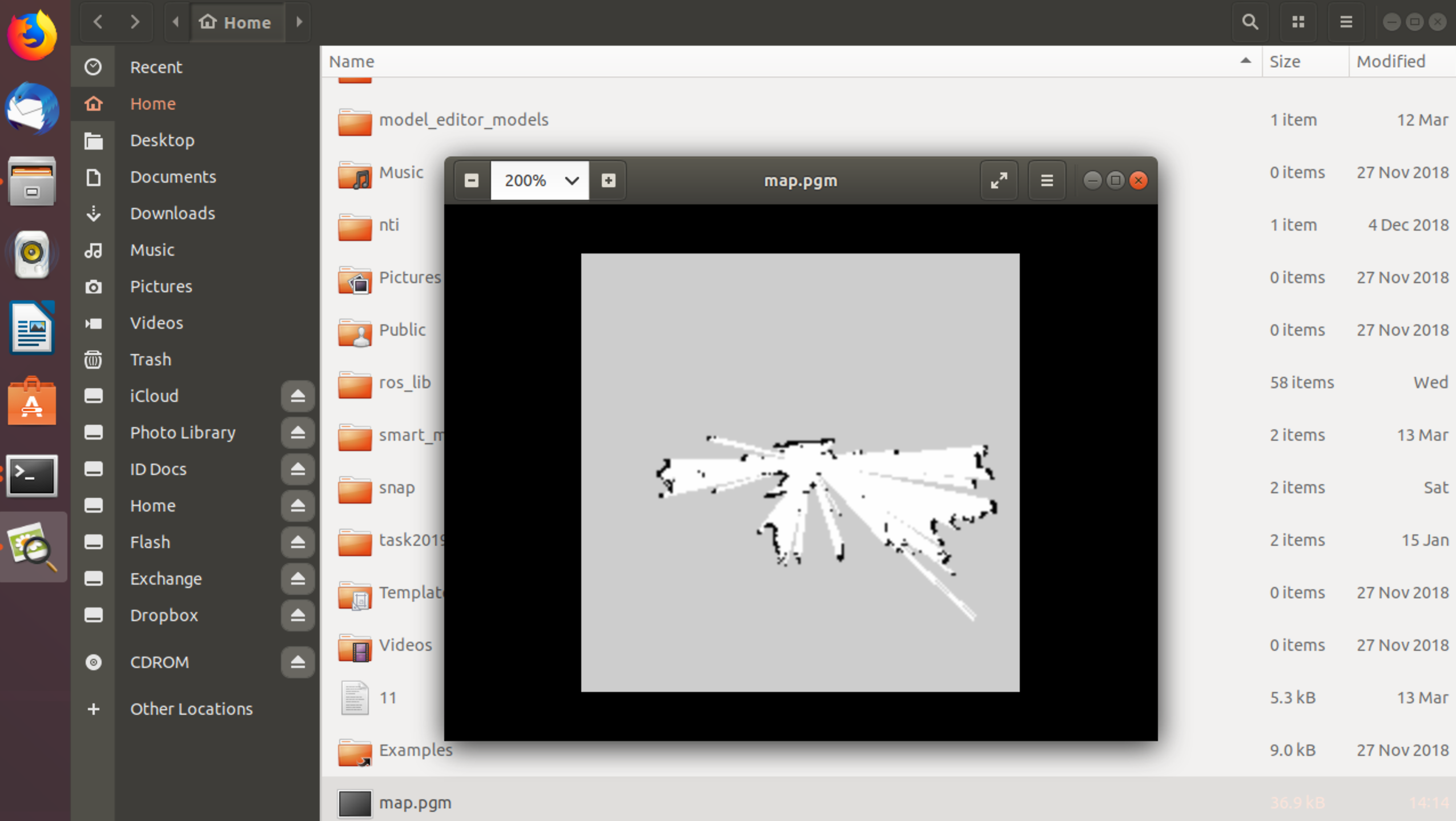
Сохраните ваш файл с картой, он нам понадобится в следующих главах.