Изменение геометрических параметров робота
Размеры робота, которые учитываются при построении сostmap в терминологии ROS называются robot footprint и задаются в конфигурационных файлах costmap_common_params_turtlebro.yaml.
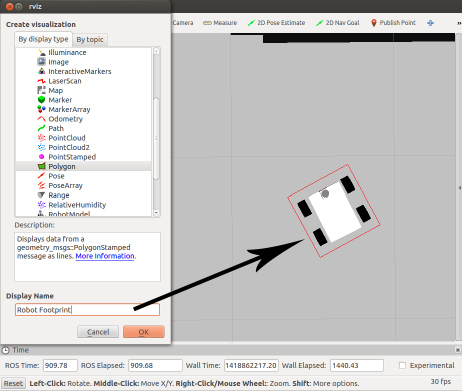
При изменении размеров робота необходимо изменить параметр: footprint: [[-x, -y], [-x, y], [x, y], [x, -y]]
где x = длина робота/ 2 и y = ширина робота/ 2 После этого пакет необходимо пересобрать. Правильность изменения параметров можно проверить через команду rosparam, после запуска пакета навигации, например так:
rosparam get /move_base/local_costmap/footprint
rosparam get /move_base/global_costmap/footprint